ฉันจะบอกว่ามันเป็นเพียงไดรเวอร์ที่ง่ายมากที่จะแก้แค้นองค์ประกอบทั้งหมดและการผลักดัน 40 W ในสองช่อง!
4 ส่วนและ 40 วัตต์ x 2 ทำงานหนัก Karl! เป็นกลอุบายสำหรับผู้ที่ชื่นชอบรถ ดังนั้นจะใช้พลังงานจาก 12 โวลต์ ช่วงตั้งแต่ 8 ถึง 18 โวลต์ Yogo สามารถต่อสายเข้ากับซับวูฟเฟอร์หรือระบบลำโพงได้อย่างง่ายดาย
บริษัทที่เพิ่งเริ่มต้นทั้งหมดในปีปัจจุบันล้วนแต่เป็นฐานชัยชนะและเป็นพื้นฐาน และไมโครเซอร์กิตเองคือ TDA8560Q
บริษัท Tse microcircuit "PHILIPS" ก่อนหน้านี้ TDA1557Q ได้รับการขยาย ดังนั้นคุณสามารถเปลี่ยนแหล่งจ่ายไฟสเตอริโอด้วยแรงดันเอาต์พุต 22 W ได้ Ale їїnadalіปรับปรุงให้ทันสมัยพวกเขาอัปเดตสเตจเอาต์พุตและ TDA8560Q ปรากฏขึ้นพร้อมกำลังขับ 40 วัตต์ต่อช่องสัญญาณ คล้ายกับє TDA8563Q
แผนภาพของผู้ขับขี่รถยนต์บนไมโครเซอร์กิต
บนแผนผังมีไมโครเซอร์กิต ตัวเก็บประจุอินพุตสองตัวและตัวกรองหนึ่งตัว ตัวเก็บประจุตัวกรองถูกระบุสำหรับขั้นต่ำ 2200 uF แต่มันจะง่ายกว่าถ้าใช้ตัวเก็บประจุ 4 ตัวและขนานกัน ดังนั้นคุณจะมั่นใจได้ว่าหุ่นยนต์จ่ายไฟที่ความถี่ต่ำจะมีเสถียรภาพมากขึ้น ต้องต่อไมโครเซอร์กิตกับวิทยุซึ่งมีความสวยงามมากกว่าZbіrkaง่าย pidsilyuvach


นอกจากนี้ยังสามารถเปลี่ยนจำนวนส่วนประกอบในวงจรได้ ซึ่งจะเพิ่มความน่าเชื่อถือระหว่างการทำงาน แต่ไม่ใช่ในหลักการ

ที่นี่ฉันได้เพิ่มรายละเอียดอีกห้าข้อ ฉันจะอธิบายว่าทำไม ตัวต้านทาน 10K ohm สองตัวจะทำความสะอาดพื้นหลัง เพื่อให้ลูกดอกพุ่งไปที่วงจร ตัวต้านทาน 27 To Ohm і 47 μF ตัวเก็บประจุให้การเริ่มต้นที่ราบรื่นของไดรเวอร์โดยไม่กระทบกระเทือน และตัวเก็บประจุ 220 pF จะถูกเป่าออกจากจัมเปอร์ความถี่สูงตามสายไฟ ดังนั้น ฉันขอแนะนำให้ทำโครงการกับมหาวิทยาลัย qimi ให้เสร็จสิ้น เราจะไม่ยืมมัน
ฉันต้องการให้เพิ่มอีกนิดเพื่อที่ฉันจะได้พัฒนาแรงดันสำหรับแรงดันไฟฟ้า 2 โอห์มเท่านั้น ที่ 4 โอห์มจะใกล้เคียงกับ 25 W แต่ก็ไม่ท่วมเช่นกัน แล้วอะคูสติกของ radianska rozgoydaєของเราล่ะ
การคุกคามแบบขั้วเดียวและแรงดันต่ำให้ประโยชน์เพิ่มเติม: ชัยชนะในเครื่องเสียงรถยนต์ ที่บ้านคุณสามารถใช้ชีวิตจากบล็อกคอมพิวเตอร์เก่าได้
จำนวนส่วนประกอบขั้นต่ำช่วยให้คุณเปลี่ยนชิ้นส่วนเก่าซึ่งเป็นวิธีที่ดีที่สุดบนไมโครเซอร์กิตของแบรนด์ที่ใหญ่ที่สุด
3.2 TDA8356
ไมโครเซอร์กิตของเอาต์พุตลดหลั่นของโรเตอร์บุคลากร TDA8356 ถูกกำหนดไว้สำหรับการบันทึกในโทรทัศน์ด้วยมุมมอง 90 และ 110 องศา แคสเคดเอาต์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้สัญญาณโรเตอร์ถูกกระตุ้นที่ความถี่ตั้งแต่ 50 ถึง 120 Hz ไมโครเซอร์กิตออกให้ในแพ็คเกจ SIL9P โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 30. แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ 31.
อินพุตเรียงซ้อนของไมโครเซอร์กิตของตัวบ่งชี้สำหรับหุ่นยนต์ที่มีซิงโครโพรเซสเซอร์ ซึ่งสร้างสัญญาณคล้ายไฟล์ดิฟเฟอเรนเชียลของดอกกุหลาบบุคลากร ซึ่งมาถึง viv 1 і 2 ในเวลาเดียวกันแนวรองรับของสปริงโพสต์ไลน์นั้นเกิดจากเจเรลของแนวรับของไมโครเซอร์กิต ตัวต้านทาน RCON ที่มีชื่อเสียงเชื่อมต่อกับอินพุตดิฟเฟอเรนเชียลสองอินพุต ซึ่งเชื่อมต่อกับดีดผ่านขดลวดเฟรมของการเชื่อมต่อ ความชุกของอินพุตดีดจากวีซ่าอินพุตเริ่มต้นเป็น:
IinRCON = IvihґRM, de Ivih - ดีดผ่านเฟรมของ vidhilennya
แอมพลิจูดสูงสุดของแรงดันไฟฟ้าขาเข้าจากจุดสูงสุดถึงจุดสูงสุดคือ 1.8 V (ค่าปกติคือ 1.5 V) รูปแบบการเชื่อมโยงที่มองเห็นได้ทำให้คุณสามารถเปลี่ยนเฟรมจาก cat ไปด้านหน้าของ cascade ไปที่ด้านหน้าของ cascade (viv. 7 และ 4) ในการควบคุมดีดที่ส่งผ่านเฟรม ตัวต้านทาน RM จะเปิดขึ้นหลังจากนั้น ความเครียด scho ที่จะถูกสร้างขึ้นบนตัวต้านทานทั้งหมดผ่าน viv วงจรไมโคร 9 ตัวขึ้นไปตามสัญญาณของเสียงที่ดังขึ้น ซึ่งพันกันค่าของดีดขาออก เมื่อค่าของ RM เปลี่ยนไป ค่าสูงสุดของเอาต์พุตสตรีมสามารถตั้งค่าได้ตั้งแต่ 0.5 ถึง 2 A
สำหรับการยึดน้ำตก vykhid การเคลื่อนไหวที่มีพลังได้รับชัยชนะเป็นเวลาหนึ่งชั่วโมง การมองเห็นในทวนภายนอกของคอนเดนเซอร์ razdil ช่วยให้มีความพยายามในชัยชนะได้อย่างมีประสิทธิภาพมากขึ้น เพื่อรายงานตลอดเวลาตลอดระยะเวลาก่อนการหมุนรอบจะรายงานไปยังแมวที่คัดเลือก
ไมโครเซอร์กิตมีฟังก์ชันพื้นฐานหลายประการ ในการรักษาความปลอดภัยหุ่นยนต์ที่ปลอดภัยสำหรับน้ำตกภายนอก:
อ่างความร้อน;
zahist กับความสับสนสั้น ๆ mіzh viv 4 ฉัน 7;
zahist พบความสับสนสั้น ๆ dzherel zhivennya
สำหรับการดับไฟของ kinescope สัญญาณจะเกิดขึ้นในวงจรดับไฟ:
pid ชั่วโมงของหลักสูตรหมุนเวียนของบุคลากร rozgortki;
ด้วยmіzh viv สั้น ๆ 4 і 7 หรือ dzherel อาศัยอยู่บนร่างกาย
เมื่อมีเสียงกริ่งดังขึ้น
เมื่อเปิดใช้งานการสูญเสียความร้อน
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง แปด.
3.3 TDA8357J
ไมโครเซอร์กิต TDA8357J ออกแบบมาสำหรับการบันทึกในโทรทัศน์ด้วยมุมมอง 90 และ 110 องศา แคสเคดเอาท์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้คนขับขับไมโครเซอร์กิตด้วยความถี่สัญญาณตั้งแต่ 25 ถึง 200 เฮิรตซ์ เช่นเดียวกับการตั้งค่าคอยส์สำหรับหน้าจอจากเอาต์พุตของด้าน 4: 3 ถึง 16: 9 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 32 และ її ไดอะแกรมโครงสร้างแสดงในรูปที่ 33. เพิ่มเทคโนโลยีไบโพลาร์ CMOS และ DMOS ลงในไมโครเซอร์กิตแล้ว
ขั้นตอนอินพุตของไมโครเซอร์กิตของค่าสำหรับหุ่นยนต์ที่มีซิงโครโปรเซสเซอร์ ซึ่งสร้างสัญญาณคล้ายไฟล์ดิฟเฟอเรนเชียลของดอกกุหลาบบุคลากรที่มีระดับอ้างอิงของความตึงเครียดคงที่ ในเวลาเดียวกัน พบว่าอินพุต strum เป็นดังนี้:
2ґIвхґRвх = IvihґRM, de Ivih - ดีดผ่านเฟรมของตัวจับ
แอมพลิจูดสูงสุดของแรงดันไฟฟ้าขาเข้าจากจุดสูงสุดถึงจุดสูงสุดคือ 1.6 โวลต์
เฟรมคอยล์ถูกเปิดในที่สุดด้วยตัวต้านทาน RM ที่เชื่อมต่อกับอินพุตแอนติเฟสของเอาต์พุตคาสเคด (viv. 7 และ 4) สำหรับการรักษาเสถียรภาพของแอมพลิจูดของ strum แกนนำ วงแหวนเสียงเชิงลบจะถูกสร้างขึ้น แรงดันไฟฟ้าของวงแหวนเรียกเข้าเป็นที่รู้จักจากตัวต้านทาน RM และผ่านตัวต้านทาน RS ไปที่อินพุตของแรงดันย้อนกลับ / ดีดซึ่งเป็นสัญญาณเอาต์พุตที่ป้อนเข้ากับอินพุตของไดรเวอร์เอาต์พุตของวงจรบริดจ์ ตัวต้านทาน RM และ RS ได้รับการจัดอันดับให้แข็งแกร่งกว่าสเตจเอาท์พุตของไมโครเซอร์กิต การเปลี่ยนค่าเล็กน้อยของตัวต้านทานทำให้สามารถตั้งค่าดีดภายนอกจาก 0.5 เป็น 2 A
ขนานกับคอยส์ ตัวต้านทานหน่วง RP ซึ่งเชื่อมต่อกระบวนการในทองแดงบุคลากร เชื่อมต่อกับคอยส์ Struma ซึ่งไหลผ่านตัวต้านทานทั้งหมดเป็นเวลาหนึ่งชั่วโมงของจังหวะตรงและกระแสน้ำวน อาจเปลี่ยนค่าได้ ดีดซึ่งไหลผ่านตัวต้านทาน RM จะถูกเก็บไว้ในดีดผ่านตัวต้านทาน RP และดีดซึ่งไหลผ่านขดลวดของเฟรม เพื่อชดเชยการเปลี่ยนแปลงในดีด มันจะถูกส่งผ่านตัวต้านทาน vimiruval ผ่านตัวต้านทานแดมเปอร์บนซัง และในกระบวนการสุดท้ายของการโยก ตัวต้านทานชดเชยสุดท้าย Rcomp จะได้รับชัยชนะ ตัวต้านทานการชดเชยที่มีชื่อเสียงรวมอยู่ใน viv 7 і 1 ด้วยการดีดเซเรลชดเชยขนาดใหญ่єการสนับสนุนสปริงบน viv 1. สำหรับzapobіgannyaฉีดสายพันธุ์vykhіdnoїบนแลนเซลอินพุตหลังจากนั้นด้วยตัวต้านทานของการเปิดไดโอด
สำหรับการดำรงชีวิตของ microcircuit สำหรับชั่วโมงของหลักสูตรหมุนเวียนต้องใช้ชีวิต dodatkovo dzherelo ของ VFB (viv. 6) การเชื่อมต่อเครือข่ายเป็นเวลาหนึ่งชั่วโมงของความเร็วหมุนเวียนได้รับการสนับสนุนโดยการถ่ายโอนภายใน การมองเห็นของคอนเดนเซอร์ razdelny ช่วยให้สามารถป้อนหม้อไอน้ำได้โดยไม่ต้องใช้ตรงกลาง การกระทบยอดของหลักสูตรหมุนเวียนเพื่อปิดหากดีด vyhidny ถึงค่าที่ตั้งไว้
โครงร่างสำหรับการดักจับ microcircuit ใช้สำหรับปิดกั้นเอาต์พุตของวงจร microcircuit ในใจของการควบคุมการดักจับความร้อนและการเปลี่ยนสวิตช์ของเอาต์พุตคาสเคดอีกครั้ง วงจรสำหรับจับไมโครเซอร์กิตจากสัญญาณภาพว่างเปล่า (viv. 8) ซึ่งสามารถใช้ร่วมกับสัญญาณ SC (sandcastle) สำหรับการซิงโครไนซ์โปรเซสเซอร์วิดีโอ Active visoky rіvenสำหรับ viv 8 เกิดขึ้นจากการยืดระยะเวลาเสียงกริ่ง ในกรณีที่เปิดทวนของวงแหวนที่ส่งเสียงกริ่งและเมื่อฮีตซิงก์ทำงาน (T = 170 ° C)
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง 9.
3.4 TDA8358J
ไมโครเซอร์กิต TDA8358J ได้รับการออกแบบสำหรับการบันทึกในชุดทีวีที่มีมุมมอง 90 และ 110 องศาเป็นเอาต์พุตของเฟรมและสำหรับส่งสัญญาณในการแก้ไขรูปแบบเรขาคณิต แคสเคดเอาท์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้คนขับขับไมโครเซอร์กิตด้วยความถี่สัญญาณตั้งแต่ 25 ถึง 200 เฮิรตซ์ เช่นเดียวกับการตั้งค่าคอยล์สำหรับกล้องจากด้านที่เชื่อมต่อของ 4: 3 ถึง 1316: 9 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 34 และ її ไดอะแกรมโครงสร้างแสดงในรูปที่ 35. ไมโครเซอร์กิตถูกจัดเตรียมโดยใช้เทคโนโลยีเดียวกันกับ Bipolar, CMOS และ DMOS
ไมโครเซอร์กิตคือการแก้แค้น vuzol rozgortki ซึ่งคล้ายกับ TDA8357J ทัศนวิสัยในการแสดงของวงจรชดเชยในรูปแบบของความตึงเครียดสำหรับตัวต้านทานชดเชย Rcomp สามารถเข้าไปในโกดังไมโครเซอร์กิตเพื่อรับสัญญาณในการแก้ไขรูปแบบเรขาคณิตได้ สัญญาณ Podsiluvach สำหรับการแก้ไขสัญญาณสำหรับการปรับปรุงโครงสร้างของการแก้ไขและไม่มีการควบคุมด้านหน้าโดยโมดูเลเตอร์ของวงจรของน้ำตกเอาท์พุทของสาขาแถว สำหรับการทำงานปกติของ pedisiluvach มารดามีความผิดเกี่ยวกับแหวนกระแสน้ำวนเชิงลบ ทวนของวงแหวนที่ส่งเสียงกริ่งเชื่อมต่อระหว่างข้อความที่กำลังดำเนินอยู่และต่อเนื่องของคนขับ แรงดันไฟฟ้าสูงสุดที่เอาต์พุตของไดรเวอร์ไม่มีความผิดในการเปลี่ยน 68 V และดีดเอาต์พุตสูงสุดรับผิดชอบไม่เกิน 750 mA
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง 10.
ไมโครเซอร์กิต TDA8567Q เป็นปุ่มกดความถี่ต่ำสองช่องสัญญาณสำหรับวงจรบริดจ์ระดับ Hi-Fi วงจรสำหรับเชื่อมต่อ TDA8567Q กับส่วนประกอบขั้นต่ำที่เชื่อมต่อ
คุณสมบัติของไมโครเซอร์กิต TDA8567Q:
- ส่วนประกอบการโทรขั้นต่ำสำหรับการเชื่อมต่อ
- กำลังขับสูง (4x25 วัตต์);
- กำหนดระดับความแข็งแกร่ง
- มีการแนะนำระบบสำหรับการวินิจฉัยโหมดและความปลอดภัย
- โหมดการผสม การทำงาน ปิดเสียง สแตนด์บาย;
- zahist กับ perevantazhennya;
- ซากิสต์เห็น zamikannya สั้น ๆ กับพื้น;
- การถ่ายภาพความร้อนในระดับต่ำในกรณีที่เกิดการสั่นไหวในระยะสั้น
- zakist จากความร้อนสูงเกินไป;
- zahist จากการกลับขั้ว;
- ซากิสต์กับวงจรไฟฟ้า
- อุณหภูมิต่ำ op_r;
- ความเข้ากันได้กับ TDA8568Q สำหรับการโรเซท nizhok
ใน microcircuit สวิตช์ของเอาต์พุตเรียงซ้อนจากการหน่วงเวลาสั้น ๆ เทอร์โมคัปเปิ้ล (เปิดเพื่อลดความดันในกรณีที่ร้อนเกินไป) สวิตช์จากสวิตช์ไปที่สวิตช์โหมดสแตนด์บาย (เปิด / ปิด) zakist vіd " เสียงดัง" เมื่อเปิด/ปิด และมีความเป็นไปได้ซ้ำซากมากมาย
เล็ก. หนึ่ง. Zovnishny viglyadไมโครเซอร์กิต

เล็ก. 2. บล็อกไดอะแกรมของไมโครเซอร์กิต TDA8567Q
การนัดหมายของ visnovk_v แสดงไว้ในตาราง 1 แต่หลัก ลักษณะทางเทคนิค- ในตาราง 2. แผนภาพการเชื่อมต่อแสดงในรูปที่ 3. รูปภาพ จ่ายสะดวกแสดงในรูป 4. โครงร่างขององค์ประกอบดอกกุหลาบบนจานแสดงในรูปที่ 5.
ตารางที่ 1. การแต่งตั้ง visnovk_v microcircuit TDA8567Q
ตารางที่ 2 ลักษณะทางเทคนิคพื้นฐานของไมโครเซอร์กิต TDA8567Q


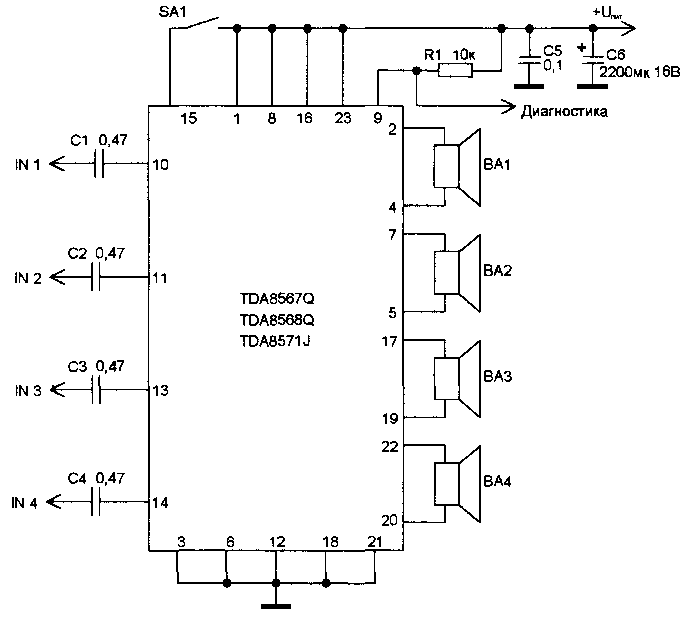
เล็ก. 3. วงจรทั่วไปของการรวมไมโครเซอร์กิต TDA8567Q

เล็ก. 4. รูปภาพการชำระเงินที่สะดวกสำหรับไดรเวอร์บนไมโครเซอร์กิต TDA8567Q

เล็ก. 5. การพัฒนาองค์ประกอบบนบอร์ดสำหรับไดรเวอร์บนไมโครเซอร์กิต TDA8567Q
Chotiricanal ULF บน TDA8567Q
Vikoristovyuchi microcircuit TDA8567Q สามารถใช้สำหรับการจ่ายไฟเกินและรัด chotirokhchannelny สำหรับรถยนต์หรือเครื่องเสียงบ้าน โครงร่างของ ULF แบบดึงลงบน microcircuit ถูกนำเสนอใน little 6 คอยล์ L1 สามารถใส่ลูกดอกเคลือบ PEV-0.47 10 รอบได้เงินรางวัลจะพันบนวงแหวนที่มีเส้นผ่านศูนย์กลางประมาณ 20 มม. สูงสุด USB1 คุณสามารถเชื่อมต่อเครื่องเล่น MP3 แท็บเล็ต หรือเพียงแค่สายชาร์จเข้ากับโทรศัพท์

เล็ก. 6. แผนผังไดอะแกรมของตัวขับรถยนต์ Chatiricanal แบบผลักดึงบนไมโครเซอร์กิต TDA8567
ไมโครเซอร์กิตมีความผิดแต่ติดตั้งอยู่บนไดรฟ์ระบายความร้อน ซึ่งเป็นชิ้นส่วนของอะลูมิเนียม หม้อน้ำจากโปรเซสเซอร์ของคอมพิวเตอร์ หรือโลหะชิ้นเล็กๆ เพื่อการระบายความร้อนที่ดีเยี่ยมจากคริสตัลของไมโครเซอร์กิต
วรรณกรรม:
- เอกสารข้อมูลสำหรับไมโครเซอร์กิต TDA8567Q: แบล็กเมล์(177 KB);
- Bashirov S.R. , Bashirov A.S. - ประสบความสำเร็จ podsiluvachi หนึ่ง;
- คอนสตรัคเตอร์ 1/251.
- PCBWay- เพียง $ 5 สำหรับ 10 บอร์ดทำมือ การเปลี่ยนครั้งแรกสำหรับลูกค้าใหม่คือ BEZKOSHTOVNY
- Zbir drukovanikh กระดานจาก $ 88 + จัดส่งฟรีทั่วโลก + ลายฉลุ
- การดูไฟล์ Gerber แบบออนไลน์อีกครั้งจาก PCBWay !
ความคิดเห็น (22):
pіdkazhіt hto-nebuzh j1-7 tse scho?
# 2 Dima Berezen 13 2011
คอนเนคเตอร์สำหรับต่อสายไฟสำหรับเพลาก้นจามรีบน ts_y husttsi:

ฉันจะเป็นขุนนางชั้นสูง)
# 4 กล่าวว่าหนอน 20 2011
ให้มันเป็นพังพอน ใครจะเข้าไปในช่องระหว่างตัวเองได้ ถึงได้เปลี่ยนจำนวนเป็นสอง แต่มีเพียงสองคนเท่านั้นที่ไปผิวหนัง?
# 5 รูตเวิร์ม 21 2011
ฉันกระตือรือร้นมากที่คุณสามารถเปิดไมโครเซอร์กิตเป็นคู่โดยตัดแต่งเป็นถุงที่มีช่อง 4 - 2 ช่อง คำสั่งนั้นง่าย: เป็นไปไม่ได้! เป็นไปไม่ได้เพราะความจริงที่ว่ามีช่องทางผิวหนังของ viconies แล้วตามโครงการ brukivtsi นั่นคือจาก 6-18V ตามการเก็บเกี่ยวมากกว่า 25 วัตต์ไม่ใช่ vichaviti ...
# 6 กล่าวว่า Worm 22 2011
นิ ฉันต้องการส่งสัญญาณที่อินพุตไม่ใช่ช่อง 4 แต่ส่งไปที่ 2 เช่นจากคอมพิวเตอร์หรือสิ่งที่คล้ายกัน และโยโกเล็กน้อยบนลำโพง
# 7 root Worm 23 2011
ดังนั้นจึงเป็นไปได้ คุณสามารถตั้งค่า IN1 เป็น IN2 และ IN3 เป็น IN4 แล้วส่งสัญญาณสเตอริโอไปที่ 2 จุดเพื่อเอาสัญญาณสเตอริโอออก หรือให้หมุนแกนบนแกนดังนี้:

ในวิปัทคุที่กำหนดให้นี้จะสามารถปรับความสมบูรณ์สำหรับการเดิมพันสกินของช่อง (สมดุล) ตัวเขาเองขี้อายมาก)
# 8 กล่าวว่าหนอน 23 2011
ขอบคุณมากสำหรับความช่วยเหลือ)
# 9 กล่าวว่าหนอน 23 2011
ฉันขออาหารจำนวนมากอีกครั้ง) vison 15 nizhka มีหน้าที่อะไร? Tse รวมสแตนด์บายหรือฉันผิด?
# 10 รูตเวิร์ม 23 2011
คุณถูก 100% จะได้รับ 15 วันสำหรับการจัดการโหมดสดหรือเล่น / สแตนด์บาย
# 11 TIMONTIY 03 สิงหาคม 2011
และ kudi chіplaty (การวินิจฉัย)?
# 12 รูท 04 สิงหาคม 2011
ต้องใช้ Visnovok (9 - การวินิจฉัย) เพื่อควบคุมสถานีไมโครเซอร์กิตที่สำคัญ เช่น การเดินสายใหม่โดยอินพุต การลัดวงจรในการเดินสาย ความร้อนสูงเกินไป ด้วยค่ายที่กำลังเติบโตจะมีแรงกระตุ้นของการเติบโตที่ทางเข้า ทันทีที่คุณเลือกไดรเวอร์ในตัวเลือกเดียวกัน สวิตช์ก็ไม่จำเป็นสำหรับไดรเวอร์หุ่นยนต์
# 13 รูท วันนี้ 20 2016
การสร้างการชำระเงินด้วยตนเองสำหรับ ULF บน microcircuit TDA8567: 
# 14 โรมัน Cherven 07 2016
สำหรับช่วงเวลาที่:
1. ผมต้องการเชื่อมต่อ input เข้ากับ microcircuit กลางของหูฟังในโทรศัพท์ สามารถทำได้ไหม? คุณต้องเพิ่มองค์ประกอบระหว่างโทรศัพท์และไมโครเซอร์กิตอย่างไร?
2. Harchuvannya ทุกวงจร ฉันต้องการอยู่ในรูปของอะแดปเตอร์ harchuvannya 16V (แบบของเร้าเตอร์) ได้ไหมครับ?
3. ฉันต้องการเพิ่มอีควอไลเซอร์ให้กับเสียง จะใส่ที่ไหน? ที่ทางเข้าหรือทางออก? และคุณรู้ได้อย่างไร
# 15 รูตเวิร์ม 07 2016
1. สัญญาณจากเอาท์พุตของหูฟังสามารถป้อนเข้ากับวงจรได้โดยตรง แต่หากต้องการเล่นทั้ง 4 ช่อง ให้เชื่อมต่อผ่านวงจรรีซิสเตอร์-เรกกูเลเตอร์ (วงจรในความคิดเห็นที่ 7)
2. เป็นไปได้ แต่ตามกฎแล้วในอะแดปเตอร์ดังกล่าวฉันไม่แซง 1-2.5A ไม่เพียงพอที่จะทำให้เสร็จสำหรับการระเบิดตามปกติของไดรเวอร์นี้ แนวทางปฏิบัติจะเป็นแบบเอลในระดับสูงของความบริสุทธิ์ บล็อกของการใช้ชีวิต คุณสามารถดื่มเพื่อหาเลี้ยงชีพหรือใช้ชีวิตอย่างมีความสุข สำหรับการทดลองและหุ่นยนต์ที่มีประสิทธิผลเพียงเล็กน้อย บล็อกของการใช้ชีวิตคือด้านข้าง
3. โครงการในความคิดเห็น # 7
# 16 หนอนโรมัน 08 2016
ขอบคุณมาก.
เมื่อหยิบ kolins ขึ้นมาทุกอย่างก็เยี่ยมมาก แม้จะไม่ได้กำหนดความเหมาะสมของอาหารไว้ก็ตาม
prote єพื้นหลังก็เงียบ ยังคงมีโทรศัพท์ที่มีเคสโลหะอยู่ถ้าฉันแหย่ไปที่เคสโทรศัพท์ที่มีไดนาโมมูน พื้นหลังความถี่ต่ำจะหนาขึ้น ฉันยังสามารถเชื่อมต่อได้เพียงช่องเดียวที่อินพุตและเอาต์พุต เป็นการแก้ไขสองครั้งของการตัดสินใจเกี่ยวกับ prasezdatnist
แม้จะฟังดูเหมือนไม่ถูกต้องที่จะเปิดขาที่ 15 เพียงแค่โยนїїบนบวก สารละลาย tse virne? หรือจำเป็นต้องเพิ่ม?
หน่วยรับแขก 16 โวลต์ปรากฏขึ้นพร้อมกับการเปลี่ยนแปลง นำไปเผาที่ไฟ 12 โวลท์ แม้ในความบริสุทธิ์สูงสุด อะแดปเตอร์ทั้งหมดก็ยังเชื่อมต่อกับเสียงเบส ฉันจะคิดเกี่ยวกับมันเช่นกัน
ฉันยังคง 12 nizhku ฉันเพิ่งเสียบเข้ากับโทรศัพท์หรือฉันควรเสียบเข้ากับลบ harchuvannya?
# 17 root Worm 08 2016
แบ็คกราวด์ไม่ต้องการยูนิตสำหรับอยู่อาศัย ดังนั้นจึงสามารถใช้แบตเตอรี่ 12V ขนาดเล็กได้
สำหรับสัญญาณมีความผิดในการคัดกรอง buty - สองเส้นเลือดในสายถักเปีย คุณสามารถซื้อสายสัญญาณสำหรับไมโครโฟนหรือสายสัญญาณ

การติดตั้งสารควบคุมเมือกก็เป็นไปตามระดับของเสียงรบกวนเช่นกัน
ทุกอย่างเรียบร้อยในวันที่ 15 nizhka ที่ 12 บนไดอะแกรมเชื่อมต่อกับเครื่องหมายลบและเครื่องหมายลบของไดอะแกรมยังเชื่อมต่อกับสายถักของสายเคเบิลหุ้มฉนวนสำหรับการส่งสัญญาณซึ่งสามารถเชื่อมต่อกับปลั๊กสำหรับเชื่อมต่อ ไปที่สัญญาณ
# 18 โรมัน Cherven 11 2016
ขอขอบคุณ. ถ้าคุณเอาทุกอย่างบนกระดาน เสียงทั้งหมดก็หายไป กรานั้นสะอาด เอลไม่ได้ร้องมากขึ้นอย่างที่ฉันต้องการ b, ale tse dribnitsi
ควบคุมเสียงด้วยเสียง เอลควบคุมของคอลัมน์ผิว okremo คุณจะปรับกฎได้อย่างไรด้วยการบิดเพียงครั้งเดียวหรือคุณต้องการสองช่อง?
ฉันรู้ในอินเทอร์เน็ตว่าแผนผังดังกล่าว เมื่อหยิบขึ้นมาแล้ว ฉันจะรีเฟรชมันเพื่อไวราซผ่านโอปู
![]()
เพื่อความบริสุทธิ์สูงสุด การปรากฏตัวของเสียงที่ไวต่อน้ำแข็งอ่อน (trisk)
ในอีกทางหนึ่ง กฎเกณฑ์สามารถเห็นได้ในช่วงที่เล็กมากเพื่อให้สั้นลง แต่ไม่ค่อยมีเวลามากนักและแท้จริงแล้วไม่กี่องศาเสียงจะเพิ่มขึ้นอย่างรวดเร็วสูงสุดและไม่ใช่ความคิดที่ดีอีกต่อไป .
ในช่วงกลางของการควบคุมเสียงจะยิ่งแข็งแกร่งขึ้นในความถี่ต่ำหากสัญญาณอินพุต (จากคอมพิวเตอร์หรือโทรศัพท์) มีค่าสูงสุด
คุณสามารถทำอะไรได้บ้าง? รีโอสแตท 1 กิโลโอห์ม แรงดันไฟขาเข้า 12V. ตัวต้านทานใช้สำหรับการทดสอบตั้งแต่ 30 kOhm ถึง 1 kOhm big-mensh มา 10 kOhm 30 เสียงปิดเสียง สำหรับ 1 kOhm ส่วนของความเงียบที่เย็นสบายนั้นยอดเยี่ยม และเพียงชั่วขณะ Guchness ก็เข้าใกล้ซังปั่นมากขึ้น 20 นาที
ทรานซิสเตอร์ 3102BM.
# 19 รูตเวิร์ม 12 2016
ในการควบคุมความบริสุทธิ์ของผิวจากช่องสัญญาณคู่ คุณสามารถเก็บตัวต้านทาน 47-200 kOhm ที่ดีต่อสุขภาพได้ ซึ่งเป็นตัวเลือกที่ง่ายและถูกที่สุด นอกจากนี้ยังสามารถทราบตัวต้านทานตัวแปรสี่เท่าโดยพิจารณาจากประสิทธิภาพของตัวควบคุมเมือกแบบซิงโครนัสสำหรับช่องสัญญาณต่างๆ แกนจามรีสามารถมองเห็นได้จากตัวต้านทานต่อไปนี้:

คุณยังสามารถใช้ตัวควบคุมระดับเสียงสเตอริโอแบบดิจิตอลหนึ่งหรือสองตัว (พร้อมปุ่มควบคุมแบบกดปุ่ม) ได้ เช่น บนไมโครเซอร์กิต LC7530ถึงอย่างไร.
อีกทางเลือกหนึ่งคือตัวควบคุมดิจิตอลของการปิดเสียง + ความสมดุล + HF-LF timbre บนไมโครเซอร์กิต KR174XA54.
# 20 นวนิยาย Cherven 17 2016
ไดคุยุ ทุกอย่างยอดเยี่ยม
ยังคงเป็นแหล่งจ่ายไฟ แต่คุณสามารถเชื่อมต่อซับวูฟเฟอร์กับปลายได้หรือไม่? ผ่านตัวกรองความถี่ต่ำ จะเป็นอย่างไรถ้ามันเป็นแอมพลิฟายเออร์ okremiy ที่แย่และสวยงามกว่าสำหรับการบัดกรี tsyogo?
ที่ statti มีไมโครเซอร์กิตที่พัฒนาขึ้นของน้ำตกที่ส่งออกของบุคลากร rozgortka ไมโครเซอร์กิต Bagato เป็นที่รู้จักจาก virobnitstva แล้ว แต่ทุกอย่างมีอยู่ในร้านค้าออนไลน์ของ Dalincom และร้านค้าวิทยุอื่นๆ
1. บริษัทไมโครเซอร์กิต SANYO
1.1. LA7837, LA7838
ไมโครเซอร์กิต LA7837, LA7838 สามารถจัดเก็บในคุณภาพของการเรียงซ้อนภายนอกของบัญชีรายชื่อบุคลากรในชุดทีวีและจอภาพ LA7837 ถูกกำหนดไว้สำหรับโทรทัศน์แบบพกพาและโทรทัศน์ระดับกลางโดยมีพนักงานในโรงภาพยนตร์สูงสุดไม่เกิน 1.8 A. SIP13H การพัฒนาไมโครวงจรแสดงในรูปที่ 1 ไมโครเซอร์กิตรวมถึงทริกเกอร์อินพุตรูปคลื่นของเลื่อย - สัญญาณคล้าย, วงจรสำหรับเปลี่ยนขนาด, แหล่งจ่ายไฟออก, วงจรเพิ่มแรงดันไฟเพื่อสร้างวงจรพัลส์วงแหวน

สัญญาณของการซิงโครไนซ์บุคลากรมาถึงอินพุตของทริกเกอร์ของไมโครเซอร์กิต (viv. 2) ที่เอาต์พุตของทริกเกอร์จะเกิดแรงกระตุ้นซึ่งความถี่สะท้อนถึงความถี่ของเฟรม Zovnishnya lantsyug เชื่อมต่อกับ viv 3 หมายถึงช่วงเวลา cob ถึงชั่วโมงของการก่อตัวของสัญญาณเหมือนนักบิน รูปร่างของสัญญาณฟันเลื่อยออกไปด้านหลังตัวเก็บประจุเสริมที่เชื่อมต่อกับ viv 6. การเปลี่ยนแปลงแอมพลิจูดของสัญญาณบุคลากรจะดำเนินการตามวงจรเพิ่มเติมของการเปลี่ยนขนาดตามสัญญาณระบุด้วยความถี่ 50/60 Hz 4. สัญญาณของเสียงกริ่งซึ่งแปรผันตามแอมพลิจูดของสัญญาณขาออกนั้นทราบจากตัวต้านทานดีด-อินเทอร์มิงลิงตัวสุดท้าย ซึ่งเชื่อมต่อทีละตัวกับคอยล์พนักงานของระบบปฏิบัติการ การก่อตัวของสัญญาณบุคลากรถูกเมาเพื่อมาถึงสัญญาณของสาขาบุคลากรเมื่อน้ำตกมีพลังมากขึ้นและสายของน้ำตกต้องนอนลงที่สัญญาณเสียงเรียกเข้าจากนั้นไปที่ viv 7.

แคสเคดเอาท์พุตของไมโครเซอร์กิตถูกสร้างโดยไม่มีจุดกึ่งกลางของเอาต์พุต (viv. 12) เพื่อประโยชน์ในการดำรงชีวิตวงจรเพิ่มแรงดันจะใช้จากตัวเก็บประจุคงที่และไดโอด เป็นเวลาหนึ่งชั่วโมงการเก็บเกี่ยวน้ำตก vykhid จะดำเนินการผ่านการเรียกไปยัง viv 8. เป็นเวลาหนึ่งชั่วโมงของจังหวะการหมุนเวียนหลังจากวงจรเสริม แรงกระตุ้นแบบหมุนจะก่อตัวขึ้นจนกว่ากระแสน้ำวนจะมาพร้อมกับไอระเหย ซึ่งถูกจดจำบนตัวเก็บประจุแบบหมุนของการเพิ่มแรงดันไฟ เป็นผลให้ก่อนการเรียงซ้อนเอาต์พุตของไมโครเซอร์กิต เมื่อน้ำตกกำลังจะหมดไป แรงกระตุ้นของสนามหมุนจะก่อตัวขึ้น ซึ่งจะเปลี่ยนแรงดันไฟฟ้าของไมโครเซอร์กิตตามแอมพลิจูด เพื่อบล็อกน้ำตกไวรัส viv. 10. ลักษณะของไมโครเซอร์กิตในตาราง หนึ่ง.
1.2. LA7845

microcircuit LA7845 ติดอยู่ที่คุณภาพของเอาต์พุตน้ำตกของพอร์ตบุคลากรในชุดทีวีและจอภาพที่มีเส้นทแยงมุมหน้าจอ 33 ... 37 "และเอาต์พุตสูงสุด 2.2 A microcircuit vikhidny pidsiluvach วงจรของการเพิ่มแรงดันไฟฟ้าสำหรับ สร้างแรงกระตุ้นด้วยจังหวะการหมุนเวียนและวงจรของตัวระบายความร้อน

สัญญาณของบุคลากรเมาแล้วขึ้นไปถึงสัญญาณการกระจายกำลังพล (วิ. 5) ในเวลาเดียวกัน สัญญาณของเสียงเรียกเข้าจะดังขึ้นที่ปลายหน้าต่าง ซึ่งหมายความว่าน้ำตกจะแรงขึ้นและเป็นเส้นตรงมากขึ้น สปริงรองรับถูกจ่ายให้กับอินพุตแรกของไดรเวอร์ (viv. 4) ที่ทางเข้าของครู (วิ. 2) มุมมองจะก่อตัวขึ้น สำหรับการเก็บเกี่ยวของน้ำตกไดรฟ์ วงจรเพิ่มแรงดันไฟฟ้าจากตัวเก็บประจุเอาต์พุตและไดโอดจะถูกใช้เป็นเวลาหนึ่งชั่วโมง ลักษณะของไมโครเซอร์กิตอยู่ในตาราง 2.
1.3. LA7875N, LA7876N

Microcircuits LA7875N, LA7876N ได้รับการออกแบบมาสำหรับอุปกรณ์ที่ได้รับชัยชนะในโทรทัศน์และจอภาพที่มีอาคารแยกต่างหากคุณภาพสูง ไมโครเซอร์กิตพิมพ์ในตัวเรือน SIP10H-D และ SIP10H การพัฒนาไมโครเซอร์กิตแสดงในรูปที่ 5 และ 6 ไมโครเซอร์กิตประกอบด้วยวงจรจ่ายไฟ วงจรเพิ่มแรงดันไฟ 2 วงจร และวงจรฮีตซิงก์ ดีดเอาต์พุตสูงสุดของ LA7875N microcircuit กลายเป็น 2.2 A และ LA7876N - 3 A. บล็อกไดอะแกรมของ microcircuits แสดงในรูปที่ 7.

สำหรับชั่วโมงที่รวดเร็วของจังหวะการหมุนเวียนของบุคลากร rozgortka ซึ่งจำเป็นสำหรับความก้าวหน้าของอาคารที่แยกจากกัน วงจรเพิ่มแรงดันไฟฟ้าสองวงจรจะรวมอยู่ในไมโครเซอร์กิต ซึ่งจะช่วยให้พลังงานทำให้น้ำตกมีชีวิตชีวาขึ้นก่อนความเร็วรอบ 3 เท่า จึงสามารถเพิ่มแอมพลิจูดของแรงกระตุ้นแบบหมุนได้เพิ่มขึ้น

สัญญาณของบุคลากรถูกเมาเพื่อขึ้นไปที่อินพุตสัญญาณของบุคลากร rozgortka (viv. 6) พร้อมกันนั้นจะมีเสียงสัญญาณดังขึ้น สปริงรองรับจะจ่ายให้กับอินพุตโดยตรงของไดรเวอร์ (viv. 5) ในการเก็บเกี่ยวพลังงานน้ำตก ต้องใช้วงจรเพิ่มโวลต์สองวงจรเป็นเวลาหนึ่งชั่วโมงอย่างรวดเร็ว เพื่อให้พลังของน้ำตกพลังงานเพิ่มขึ้นสามครั้ง ลักษณะของไมโครเซอร์กิตอยู่ในตาราง 3.
1.4. STK792-210

ไมโครเซอร์กิต STK792-210 ได้รับการออกแบบมาเพื่อจัดเก็บในเอาต์พุตแบบเรียงซ้อนของบริการบุคลากรในเครื่องรับโทรทัศน์และจอภาพที่มีโครงสร้างการกระจายสูง ไมโครเซอร์กิตออกให้ในเคส SIP14C3 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 8. ไมโครเซอร์กิตประกอบด้วยวงจรเพิ่มแรงดันไฟ วงจรเพิ่มแรงดันไฟสำหรับสร้างแรงกระตุ้นด้วยจังหวะหมุนรอบ ฉีดไดโอดวงจรเพิ่มแรงดันไฟ และวงจรตั้งศูนย์ในแนวตั้ง แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ 9.

สัญญาณของพนักงานถูกเมาผ่านสัญญาณเรียกเข้าเพื่อมาที่สัญญาณของพนักงาน (วิ. 12) ที่ทางเข้าของคนขับรถที่ส่งเสียงกริ่ง สัญญาณจะถูกเก็บไว้พร้อมกับสัญญาณเรียกเข้า ซึ่งหมายความว่าทั้งช่องจะสามารถรองรับพนักงานและสายได้ แรงดันอ้างอิงและสัญญาณของวงแหวนขนาดเล็กจะถูกส่งไปยังอินพุตสุดท้ายของไดรเวอร์สุดท้าย vidhilennya ดีดเกิดขึ้นที่ทางเข้าของเด็ก (วิ. 4) สำหรับการเก็บเกี่ยวของน้ำตกเอาท์พุทของไดรฟ์ก่อนชั่วโมงของการหมุนวงจรของการเพิ่มแรงดันไฟฟ้าด้วยไดโอดที่ขับเคลื่อนด้วยและตัวเก็บประจุเอาท์พุท (viv. 6 і 7) ได้รับการพัฒนา สำหรับกฎระเบียบของจุดศูนย์กลางของ vikoristovu ที่จะนำเสนอโครงร่างของจุดศูนย์กลางของแนวดิ่ง ศูนย์กลางในการสร้างศักยภาพการพัฒนาอย่างยั่งยืนในวิ 2. ลักษณะของไมโครเซอร์กิตในตาราง 4.
1.5. STK79315A
ไมโครเซอร์กิต STK79315A ได้รับการออกแบบสำหรับการจัดเก็บในจอภาพโดยสามารถปรับความจุของน้ำตกแบบเรียงซ้อนได้ microcircuit ออกในแพ็คเกจ SIP18 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 10. ไมโครเซอร์กิตประกอบด้วยเครื่องกำเนิดความถี่ cadre, สัญญาณคล้ายนักบิน, วงจรเพิ่มแรงดัน, วงจรเพิ่มแรงดันไฟสำหรับพัลส์ความเร็วตัวแปร, วงจรเพิ่มแรงดันไฟ และวงจรตั้งศูนย์ในแนวตั้ง แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ สิบเอ็ด

สัญญาณ TTL ไปที่อินพุตการซิงค์ของเครื่องกำเนิดความถี่เฟรม (viv. 18) ชื่อเครื่องกำเนิดแลนซ์เชื่อมต่อกับ viv 16. สัญญาณเอาท์พุตของเครื่องกำเนิดไฟฟ้าจะเข้าสู่วงจรเพื่อสร้างสัญญาณคล้ายนักบิน ตัวเก็บประจุที่มีชื่อเสียงของรูปแบบการเชื่อมต่อกับ viv 11. หอกของเสียงเรียกเข้าของ Formulator ซึ่งหมายถึงสายสัญญาณขาออกจะกลับมาที่ viv 14. แอมพลิจูดของสัญญาณไฟล์ระบุด้วยศักยภาพของ viv 12. เมื่อบุคลากรสร้างสัญญาณอินพุต สัญญาณจะขึ้นไปยังสัญญาณการกระจายกำลังพล จะได้รับสัญญาณเสียงเรียกเข้าที่อินพุตแรกของคนขับจากเลนสุดท้าย ซึ่งจะเริ่มทำให้การเรียงซ้อนแรงขึ้นและดีขึ้น เมื่อไฟล์มีความแข็งแรงเพียงพอ สัญญาณของสาขาบุคลากรจะถูกส่งไปยังเอาต์พุตแบบเรียงซ้อน ที่เอาต์พุตของเอาต์พุตคาสเคด (viv. 3) เอาต์พุตดีดจะเกิดขึ้น ในการเก็บเกี่ยวเอาต์พุตคาสเคดเป็นเวลาหนึ่งชั่วโมงหรือมากกว่านั้น จะใช้วงจรเพิ่มแรงดันที่มีไดโอดในตัวและตัวเก็บประจุเอาต์พุต (viv. 5 และ 6) การควบคุมวงจรเพิ่มแรงดันไฟฟ้าดำเนินการโดยพัลส์ภายนอกผ่าน viv 4 ไมโครวงจร สำหรับกฎระเบียบของจุดศูนย์กลางของ vikoristovu ที่จะนำเสนอโครงร่างของจุดศูนย์กลางของแนวดิ่ง การรวมศูนย์ของการเปลี่ยนแปลงในศักยภาพของระดับถาวรใน viv 2. ลักษณะของไมโครเซอร์กิตอยู่ในตาราง 5.
2. ไมโครเซอร์กิตจาก SGS THOMSON
2.1. TDA1771
.png)
ไมโครเซอร์กิต TDA1771 ถูกจัดเก็บไว้ในเครื่องรับโทรทัศน์และมอนิเตอร์ โดยสามารถเรียงเป็นแคสเคดของบัญชีรายชื่อบุคลากรได้ microcircuit ออกในแพ็คเกจ SIP10 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 12. วงจรไมโครประกอบด้วยรูปแบบของสัญญาณคล้ายเลื่อย, แหล่งจ่ายไฟออก, วงจรเพิ่มแรงดันไฟฟ้าเพื่อสร้างแรงกระตุ้นของการวิ่งแบบหมุนและวงจรระบายความร้อน แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ สิบสาม
.png)
สัญญาณของการซิงโครไนซ์กำลังพลของขั้วลบมาในรูปของเครื่องดื่มของบุคลากร (viv. 3) จนถึงวิฟ 6 การเชื่อมต่อ ตัวเก็บประจุสูตร และแอมพลิจูดของสัญญาณที่เอาต์พุตของสูตรถูกควบคุมโดยแลนเซอร์เพิ่มเติม ซึ่งเชื่อมต่อกับ viv 4. การก่อตัวของสัญญาณคล้ายนักบินผ่านระยะบัฟเฟอร์ใน viv 7 และ 8 ขึ้นมาเป็นสัญญาณของผู้ให้บริการบุคลากร ในเวลาเดียวกัน อินพุตของไดรเวอร์จะได้รับสัญญาณเรียกเข้า ซึ่งหมายความว่าน้ำตกเอาต์พุตจะแรงขึ้นและเป็นเส้นตรงมากขึ้น สปริงรองรับจากตัวปรับความเค้นภายในถูกจ่ายให้กับอินพุตแรกของไดรเวอร์ (แบบตรง) ที่ทางเข้าของผู้สอน (viv. 1) มุมมองจะก่อตัวขึ้น สำหรับการเก็บเกี่ยวของน้ำตกไดรฟ์ วงจรเพิ่มแรงดันไฟฟ้าจากตัวเก็บประจุเอาต์พุตและไดโอดจะถูกใช้เป็นเวลาหนึ่งชั่วโมง ลักษณะของไมโครเซอร์กิตอยู่ในตาราง 6.
2.2. TDA8174, TDA8174W
.png)
Microcircuits TDA8174, TDA8174W, TDA8174A สามารถใช้เป็นน้ำตกแบบเรียงซ้อนของ cadres ในชุดทีวีและจอภาพ ไมโครเซอร์กิตมีจำหน่ายในเรือน MULTIWATT11 และ CLIPWATT11 ตามความเหมาะสม การพัฒนาไมโครเซอร์กิตแสดงในรูปที่ 14 และ 15. ไมโครเซอร์กิตประกอบด้วยสัญญาณคล้ายเลื่อย แหล่งจ่ายไฟออก วงจรเพิ่มแรงดันไฟสำหรับสร้างพัลส์หมุนและวงจรดักจับความร้อน แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ สิบหก
.png)
สัญญาณของการซิงโครไนซ์กำลังพลของขั้วลบมาในรูปของเครื่องดื่มของบุคลากร (viv. 3) จนถึงวิฟ 7 การเชื่อมต่อ ตัวเก็บประจุสูตร และแอมพลิจูดของสัญญาณที่เอาต์พุตของสูตรถูกควบคุมโดยแลนเซอร์เพิ่มเติม ซึ่งเชื่อมต่อกับ viv 4. การก่อตัวของสัญญาณคล้ายนักบินผ่านระยะบัฟเฟอร์ใน viv 8 และ 9 มาถึงสัญญาณของบุคลากร rozgortka ในเวลาเดียวกัน สัญญาณเรียกเข้าที่ปลายหน้าต่าง ซึ่งหมายถึงความแรงและเส้นของน้ำตกที่ไหลออก สปริงรองรับจากตัวปรับความเค้นภายในถูกจ่ายให้กับอินพุตแรกของไดรเวอร์ (แบบตรง) ที่ทางเข้าของผู้สอน (viv. 1) มุมมองจะก่อตัวขึ้น สำหรับการเก็บเกี่ยวของน้ำตกไดรฟ์ วงจรเพิ่มแรงดันไฟฟ้าจากตัวเก็บประจุเอาต์พุตและไดโอดจะถูกใช้เป็นเวลาหนึ่งชั่วโมง ลักษณะของไมโครเซอร์กิตอยู่ในตาราง 7.
2.3. คุณสมบัติการทำงานของไมโครเซอร์กิตจาก SGS THOMSON
.png)
ในรูปแบบของสัญญาณคล้ายเลื่อยในไมโครเซอร์กิตของ บริษัท SGS THOMSON จะมีการสร้างรูปแบบขึ้นซึ่งไดอะแกรมแสดงในรูปที่ 17. สัญญาณคล้ายนักบินที่จะไปไกลกว่าขั้นตอนการชาร์จของตัวเก็บประจุขั้นสุดท้าย ด้วยดีดถาวรของดีเจอเรลภายในของดีดเจอเรล IX มันถูกสร้างขึ้นบนตัวเก็บประจุและสัญญาณแบบนักบินจะถูกป้อนผ่านสเตจบัฟเฟอร์ไปยังอินพุตของสัญญาณแบบเฟรมของไมโครเซอร์กิต น้ำตกบัฟเฟอร์มีอิมพีแดนซ์เอาต์พุตต่ำ เป็นเวลาหนึ่งชั่วโมงในการชาร์จตัวเก็บประจุที่อินพุตของบัฟเฟอร์น้ำตกของการเติบโตจนกระทั่งถึงเวลาที่ปุ่ม T1 ถูกปิดซึ่งถูกบดขยี้โดยพัลส์ซิงโครไนซ์ของการซิงโครไนซ์บุคลากร เมื่อกดปุ่ม ตัวเก็บประจุจะเริ่มคายประจุ เมื่อถึงอินพุตของระยะบัฟเฟอร์ ระดับของสปริงคีย์ Umin จะถูกปล่อยและกระบวนการชาร์จซ้ำ การควบคุมแอมพลิจูดของสัญญาณจะดำเนินการเพื่อการเปลี่ยนแปลงมูลค่าของตัวเก็บประจุประจุไฟฟ้า
.png)
น้ำตกปลายน้ำของ microcircuit ของตัวบ่งชี้สำหรับการก่อตัวของน้ำตกเอาท์พุทในขดลวดบุคลากรที่มีค่าตั้งแต่ 1 ถึง 3 A และกระแสน้ำวนสูงถึง 60 V วงจรทั่วไปของน้ำตกเอาท์พุทจะแสดงในรูป . 18. Vyhіdny cascade pratsyuєในลักษณะดังกล่าว ด้วยการยืดส่วนแรกของคาบของโรเตอร์ ทรานซิสเตอร์ Q2 แบบเอียงและดีดจะผ่านตะกั่วใหม่ของเจอเรลเข้าไปในเฟรมของหม้อไอน้ำ OS ในอีกครึ่งของช่วงเวลานั้น ดอกกุหลาบจะสะสมอยู่ในคอยล์พนักงาน พลังงานจะมีรูปร่างเหมือนดีดเสียงกริ่ง ซึ่งขัดกับขดลวดของสต๊าฟผ่านทรานซิสเตอร์อินพุต Q8 ในการรับพัลส์ระดับสูงของจังหวะหมุนที่เอาต์พุตของพาวเวอร์ซัพพลาย ทรานซิสเตอร์ Q8 จะถูกบล็อกด้านหลังทรานซิสเตอร์เพิ่มเติม Q7 เป็นเวลาหนึ่งชั่วโมงของจังหวะการหมุนของโรเตอร์
.png)
สำหรับการวิ่งแบบหมุนอย่างรวดเร็วบนทองแดงของพนักงาน เป็นเวลาหนึ่งชั่วโมงของการหมุน การเปลี่ยนแปลงจะมีมากขึ้น จิตวิญญาณน้อยลงก่อนที่จะโยกไปหนึ่งชั่วโมง การปรับการควบคุมของน้ำตกที่หมุนได้เป็นเวลาหนึ่งชั่วโมงของการวิ่งแบบหมุนจะอยู่ด้านหลังตัวสร้างเสริมของการวิ่งแบบหมุน
.png)
แผนภาพทั่วไปของเครื่องหมุนแสดงในรูปที่ 18. รูปร่างของสตรูมาผ่านเฟรมและสปริงบนพวกเขาในกระบวนการจัดบุคลากรแสดงในรูปที่ 19. ในช่วงเวลาของโรเตอร์ (div. รูปที่ 19, t6 - t7) ทรานซิสเตอร์ Q3, Q4 และ Q5 จะถูกปิด และทรานซิสเตอร์ Q6 อยู่ในเครือข่าย (รูปที่ 20) เมื่อดีดผ่านจุดพัก ผ่าน DB, CB และ Q6 ในกรณีชาร์จตัวเก็บประจุ CB เป็นค่า UCB = US - UDB - UQ6 (us) ในตอนท้ายของช่วงเวลา กระแสน้ำจะถึงค่าสูงสุด เมื่อมีสัญญาณและระยะทางที่ไหลจากผู้ปฏิบัติงานที่น้ำตกที่ไหลออก ในช่วงเวลาเดียวกันนั้น สุ่มพนักงาน UA มีการเข้าถึงขั้นต่ำ
.png)
บนซังรูปร่างของจังหวะหมุน (div. รูปที่ 19 t0 - t1) เป็นทรานซิสเตอร์ของสเตจเอาต์พุต Q8 ซึ่งก่อนที่ฉิ่งจะผ่านจากรังจะโค้งงอการก่อตัวของพลังงานที่สะสมใน วัวผ่านแอ่งน้ำ D1 ... ให้ฉันอธิบาย shlyakhi ที่ผ่านดีดในรูปที่ 21. หากแรงดันไฟฟ้าที่จุด A เปลี่ยนค่าของสหรัฐอเมริกา (div. รูปที่ 19, t1 - t2) ทรานซิสเตอร์ Q3 จะปรากฏขึ้น และทรานซิสเตอร์ Q4 และ Q5 จะถูกเปลี่ยนเป็นความอิ่มตัว เป็นผลให้ทรานซิสเตอร์ Q6 ปิดตัวลง ยืดระยะเวลาของสปริงที่จุด D ถึงค่า UD = US - UQ4 (us) ในตำแหน่งดังกล่าว สปริงที่จุด B (สปริงของน้ำตกสด) จะกลายเป็น:
.png)
UB = UCB + UD abo
UB = UCB + US - UQ4 (เรา)
.png)
เมื่อทรานซิสเตอร์ Q4 ปิดตัวลงที่จุด D ที่จุด D, UD = US - UQ4 (เรา) ทรานซิสเตอร์ Q4 จะปิดตัวลง และเมื่อถึงเวลา t2 - t3 พลังงานจะปิดเพื่อดันผ่านกระแสจาก cadres ผ่าน D1 , CB รูปที่ 22 เข้าสู่ดีเจ ... ปกป้องการชาร์จของตัวเก็บประจุ CB ในขณะนี้ t3- t4 ดีดซึ่งไหลผ่านเฟรมลดลงเป็นศูนย์ ในเวลาเดียวกัน D1 ปิด หลังจากการเปลี่ยนทรานซิสเตอร์ไปยังสเตจเอาต์พุต Q2 หลังจากสัญญาณไปยังสเตจบัฟเฟอร์ ทรานซิสเตอร์ Q3 และ Q4 จะปรากฏขึ้นในขณะนี้ (เวลา t4 - t5) เป็นผลให้สามารถซ่อมแซมการดีดผ่าน Q4, CB และ Q2 ได้โดยพนักงานของหม้อไอน้ำ การจ่ายพลังงานให้กับนักสะสม Q2 ของคลังสินค้า UB = UCB + US - UQ4 (us) เพื่อให้มูลค่าของพื้นที่ใช้สอยลดลง ฉันจะอธิบายให้สตรูมาในรูปที่ 23.
.png)
กระบวนการนี้ง่ายจนกว่าสัญญาณจะไปถึงขั้นบัฟเฟอร์ และคุณเห็นทรานซิสเตอร์ Q2 ของสเตจเอาท์พุต หากแรงที่จุด A ถึงค่าของแรง US (div. รูปที่ 19, t5 - t6) เครื่องกำเนิดของสโตรกแบบหมุนจะถูกบล็อก ในเวลาเดียวกัน ทรานซิสเตอร์ Q3 ปิดตัวลง และทรานซิสเตอร์ Q4 ปิดตัวลง ซึ่งปิดระหว่างจุด D และ C (US) นอกจากนี้ UB จะลดลงเป็นค่า UB = US - UDB
3. ไมโครเซอร์กิตจาก PHILIPS
3.1. TDA8354Q
Microcircuit TDA8354Q єไดอะแกรมของเอาต์พุตลดหลั่นของโรเตอร์บุคลากรสำหรับการบันทึกในชุดทีวีด้วยมุมมอง 90 และ 110 ° แคสเคดเอาต์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้ความถี่ของสัญญาณเอาต์พุตจาก 25 ถึง 200 Hz ตัดได้ เช่นเดียวกับเอาต์พุตของคอยล์สำหรับหน้าจอที่มีด้านเอาต์พุตเป็น 4: 3 และ 16: 9 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 24. แผนภาพบล็อกแสดงในรูปที่ 25. เพิ่มเทคโนโลยีไบโพลาร์ CMOS และ DMOS ลงในไมโครเซอร์กิตแล้ว

เอาต์พุตลดหลั่นในจอแสดงผลมาตรฐานช่วยให้สามารถเชื่อมต่อคอยล์บุคลากรผ่านตัวเก็บประจุไฟฟ้าราคาแพง ซึ่งอยู่ใกล้กับ 2200 uF ซึ่งจะป้องกันการไหลอย่างต่อเนื่องผ่านขดลวดของเฟรม อย่างไรก็ตาม สำหรับราคาที่สูงขึ้น จะต้องจัดหาตัวเก็บประจุก่อนที่ภาพจะแสดงเมื่อช่องผสมกัน Zastosovuvana ใน TDA8354Q brukіvkaแผนภาพvihіdnihkaskadіvdozvolyaєpіdklyuchitikadrovі kotushki scho vіdhilyayut bezposeredno เพื่อvihodіvpіdsilyuvachіvโดยไม่ต้องrozdіlovogoเก็บประจุ zavdyaki Chomu usuvaєtsya vkazane vische pіdstribuvannyaและ takozh polegshuєtsyastabіlіzatsіya encampments ภาพบนvertikalіสำหรับ rakhunok keruvannya postіynimขนาดเล็กดีด

เฟรมคอยล์เชื่อมต่อกับเอาต์พุตคาสเคด (viv. 9 และ 5) สุดท้ายด้วยตัวต้านทานอินพุต RM ความเค้นของตัวต้านทานทั้งหมดเป็นสัดส่วนกับกระแส เพื่อให้แอมพลิจูดของ struma ของแกนนำมีความเสถียรจึงสร้างวงแหวนกระแสน้ำวนเชิงลบ (รูปที่ 25) ทราบแรงดันเสียงเรียกเข้าจากตัวต้านทาน RM และครั้งสุดท้ายที่เชื่อมต่อตัวต้านทาน RCON ไปที่อินพุตของสปริงย้อนกลับ / ดีด สัญญาณเอาท์พุตของการแปลงซ้ำจะไปที่อินพุตของไดรเวอร์เอาท์พุต A ของวงจรบริดจ์ ค่าความต้านทานของ RM และ RCON ขึ้นอยู่กับความแรงของสเตจเอาท์พุตของไมโครเซอร์กิต การเปลี่ยนค่าเล็กน้อยของตัวต้านทานทำให้สามารถตั้งค่าดีดภายนอกจาก 0.5 เป็น 3.2 A
เพื่อทำให้ microcircuits มีชีวิตชีวาขึ้นเป็นเวลาหนึ่งชั่วโมงหรือมากกว่านั้นด้วยความเร็ว ก็คุ้มค่าที่จะ dodatkovo dzherelo living UFLB (viv. 7) การเชื่อมต่อของความตึงเครียดเพิ่มเติมเป็นเวลาหนึ่งชั่วโมงของความเร็วในการหมุนนั้นเชื่อมต่อกับการถ่ายโอนภายใน การมองเห็นของคอนเดนเซอร์ razdelny ช่วยให้สามารถป้อนหม้อไอน้ำได้โดยไม่ต้องใช้ตรงกลาง
การเปลี่ยนแปลงของเส้นทางหมุนเวียนจะเปลี่ยนไปหาก vyhidny strum ถึงค่าที่ตั้งไว้ Vyhіdnyดีดในเวลาเดียวกันนั้นเกิดจากน้ำตก A. ความเครียดในvykhodіเปลี่ยนเป็นระดับของ vypruga vivlennya หลัก
โครงร่างสำหรับการจับไมโครเซอร์กิตนั้นใช้เพื่อสร้างสัญญาณให้กับลูกค้าในกรณีที่ผู้ให้บริการบุคลากรมีความผิดปกติเนื่องจากความล้มเหลวในการเผาไหม้ luminophore ของ kinescope โครงร่างสำหรับการจับภาพเครื่องกำเนิดยังเป็นสัญญาณสำหรับการดับภาพ (viv. 1) โดยการยืดการเคลื่อนที่แบบหมุนซึ่งสามารถใช้พร้อมกันกับสัญญาณ SC (sandcastle) สำหรับการซิงโครไนซ์ตัวประมวลผลวิดีโอ โครงการรับแบบฟอร์ม 1 โดยขยายระยะเวลาของหลักสูตรหมุนเวียนเช่นเดียวกับในฤดูใบไม้ร่วงที่น่ารังเกียจ:
rozіmknuti lantsyug บุคลากรลูกแมว scho vіdhilyayut (ไม่ได้ใช้งาน);
rozіmknuti lantsyug เสียงเรียกเข้า;
การมองเห็นสัญญาณแตร;
การเปิดใช้งานตัวจ่ายความร้อน (T = 170 ° C);
สับสน viv. 5 หรือ 9 สำหรับรถบัส dzherela;
สับสน viv. 5 หรือ 9 สำหรับผู้ให้บริการต่างประเทศ
ความสับสนของ vivs ที่เข้ามา 11 หรือ 12 สำหรับยางของ dzherel zhivlennya;
ความสับสนของ vivs ที่เข้ามา 11 หรือ 12 สำหรับผู้ให้บริการต่างประเทศ
สับสนในทองแดง scho vidhilyayut

ในขณะที่สัญญาณของดอกกุหลาบหยุดลง หรือสัญญาณหายไปในไก่ชน สัญญาณที่ส่งไปยังฟักไข่จะเกิดขึ้นในระยะใกล้ 120 มิลลิวินาที จำเป็นสำหรับหุ่นยนต์ที่มีสัญญาณความถี่ต่ำสุด 25 Hz สำหรับการตรวจจับและการแก้ไขสัญญาณหมุนที่ถูกต้อง
ควบคู่ไปกับคอยส์ ตัวต้านทานหน่วง RP สำหรับเชื่อมต่อกระบวนการชนกันในทองแดงบุคลากร ดีดซึ่งไหลผ่านตัวต้านทานทั้งหมดในโหมดโยกและหมุนไม่มีค่า เมื่อมีดีดที่กว้างซึ่งไหลผ่านตัวต้านทาน vimiruval RM มันจะพับเข้าไปในดีดซึ่งไหลผ่านตัวต้านทาน RP และดีดซึ่งไหลผ่านขดลวดของเฟรม จำเป็นต้องสร้างสตรูมาจนกว่าจะมีการเปลี่ยนแปลง แต่จะถูกส่งผ่านไปยังซังจนถึงกระบวนการโยก เพื่อชดเชยในชั่วโมงของการเปลี่ยนแปลงไปยังดีดซึ่งไหลผ่านตัวต้านทาน vimiruval, viklikanet ไปยังดีดผ่านตัวต้านทานการทำให้หมาด ๆ ตัวต้านทานการชดเชยเริ่มต้น Rcomp เชื่อมต่อกับอินพุตของวงจรชดเชย 9 (viv. 13) และไปยังเอาต์พุต ของวงจรชดเชย

ไดรเวอร์อินพุตของไมโครเซอร์กิต TDA8354Q ใช้สำหรับหุ่นยนต์ที่มีซิงโครโปรเซสเซอร์ เพื่อสร้างสัญญาณคล้ายไฟล์ดิฟเฟอเรนเชียลของโรเตอร์บุคลากร โดยมีแรงดันอ้างอิงของความตึงเครียดอย่างต่อเนื่อง สัญญาณจากเอาต์พุตของไดรเวอร์มาที่อินพุตของ re-vortex / ดีดตัวใดตัวหนึ่ง (รูปที่ 26) ในเวลาเดียวกัน อินพุตของอุปกรณ์ถอยหลังจะได้รับสัญญาณเสียงเรียกเข้า ซึ่งทราบผ่านตัวต้านทาน RCON (viv. 3) จนกว่าจะมีการเปลี่ยนแปลงครั้งล่าสุด มีการรายงานผ่านตัวต้านทาน RS ว่าจำเป็นต้องรู้เกี่ยวกับตัวต้านทาน RM สัญญาณเอาท์พุตของการแปลงซ้ำเป็นสัดส่วนกับโหลดที่จะส่งไปยังอินพุตของการแปลงซ้ำ ในระดับดังกล่าว ด้วยหอกปิดของเสียงกริ่ง ปราญที่บริสุทธ์จนมีศักยภาพสำหรับ viv 2 microcircuits ตามศักยภาพในการมีชีวิต 3.

แคสเคดเอาท์พุตของไมโครเซอร์กิตถูกเก็บจากวงจรที่เหมือนกันสองวงจร เชื่อมต่อด้วยวงจรบริดจ์ (รูปที่ 27) ตัวจับเฟรมเปิดอยู่และตัวต้านทานปรับค่าได้เชื่อมต่อก่อนอินพุตของสัญญาณ (viv. 9 และ 5) ที่ส่วนแรกของช่วงเวลาของเฟรมโรเตอร์ ดีดที่เหมือนไฟล์จะผ่านทรานซิสเตอร์ Q2, ไดโอด D3, เฟรมคอยล์, ตัวต้านทาน RM และทรานซิสเตอร์ Q5 ในเวลาเดียวกัน คุณจะสามารถผ่าน viv ได้ 10 ไมโครวงจร ดีดที่ไหลผ่านเฟรมเป็นค่าสูงสุดต่อหูของช่วงเวลา ซึ่งจะเปลี่ยนแปลงเป็นเส้นตรงในโลกของการแลกเปลี่ยนที่ใกล้ถึงกลางหน้าจอ ในอีกส่วนหนึ่งของช่วงเวลา ดีดโรเตอร์จะผ่านทรานซิสเตอร์ Q4, ตัวต้านทาน RM, เฟรมคอยล์ และทรานซิสเตอร์ Q3 Harchuvannya ใน vipad ทั้งหมดมาจาก dzherel เดียวกัน ale ผ่าน viv 4. เมื่อมีการดีดผ่านเฟรมมาก ขดลวดจะเปลี่ยนโดยตรงและเชิงเส้นจนถึงสิ้นสุดระยะเวลาการโยก ฉันจะอธิบายให้หุ่นยนต์ของน้ำตกที่ส่งออกในช่วงเวลาของมะเดื่อ rozgortka 28.

ก่อนชั่วโมงแห่งการหมุนเวียนของการดีดซึ่งผ่านผู้ปฏิบัติงานมีความผิดในการเปลี่ยนจากค่าต่ำสุดเป็นค่าสูงสุดในชั่วโมงสั้น ๆ Harchuvannya ก่อนชั่วโมงหมุนไปที่ viv 7 ผ่านสวิตช์เสียงเรียกเข้า - ทรานซิสเตอร์ Q1 สำหรับการเชื่อมต่อระหว่างเส้นแบ่งสองเส้นในลำดับเอาต์พุตของไมโครเซอร์กิต ไดโอด D2 และ D3 จะถูกเปิด
การก่อตัวของ stuma ของหลักสูตรหมุนเวียนแบ่งออกเป็นสองขั้นตอน ในระยะแรก (1) ดีด ระหว่างการสะสมของพลังงานที่สะสมใน cadre coppers ผ่านทรานซิสเตอร์ Q4, ตัวต้านทาน RM, cadre coils, ไดโอด D1 และตัวเก็บประจุของแลนซ์ของโดรน ) ในเวลาเดียวกันตัวเก็บประจุจะถูกชาร์จด้วยแรงดันไฟฟ้าบน viv 9. แรงกดดันสูงสุดต่อ viv 9 bude คูณ 2 ยิ่งไปกว่านั้น ลดระดับความมีชีวิตชีวาของ dzherela zorotny ลง ฉันจะอธิบายให้หุ่นยนต์ของน้ำตกขาออกในช่วงเวลาของ rozgortka ขาออก 29.
อีกขั้นของการก่อตัวของเส้นทางหมุนเวียนจะต้องได้รับการซ่อมแซมในขณะนี้หากดีดที่ผ่านเฟรมผ่านขอบศูนย์ การดีดผ่านเฟรม, ขดลวด, ถูกส่งไปยังเจเรลไปยังสนามหมุน (viv. 7), ทรานซิสเตอร์ Q1, ไดโอด D2, เฟรมคอยส์, ตัวต้านทาน RM, ทรานซิสเตอร์ Q5 สำหรับราคูนกตกบนทรานซิสเตอร์ Q1 และไดโอด D2 บน viv 9 จะเป็นวันที่ 2 ... 8 ในสปริงน้อยกว่า dzherela มีชีวิตอยู่ การดีดผ่านเฟรมของหม้อไอน้ำจะเพิ่มขึ้นตามค่าที่สัญญาณเท่ากับสัญญาณอินพุต เมื่อทรานซิสเตอร์ Q1 ปิดตัวลง รอบการเปิดปิดใหม่จะเริ่มต้นขึ้น
3.2 TDA8356
ไมโครเซอร์กิตของเอาต์พุตลดหลั่นของโรเตอร์บุคลากร TDA8356 ถูกกำหนดไว้สำหรับการบันทึกในโทรทัศน์ด้วยมุมมอง 90 และ 110 องศา แคสเคดเอาต์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้สัญญาณโรเตอร์ถูกกระตุ้นที่ความถี่ตั้งแต่ 50 ถึง 120 Hz ไมโครเซอร์กิตออกให้ในแพ็คเกจ SIL9P โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 30. แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ 31.

อินพุตเรียงซ้อนของไมโครเซอร์กิตของตัวบ่งชี้สำหรับหุ่นยนต์ที่มีซิงโครโพรเซสเซอร์ ซึ่งสร้างสัญญาณคล้ายไฟล์ดิฟเฟอเรนเชียลของดอกกุหลาบบุคลากร ซึ่งมาถึง viv 1 і 2 ในเวลาเดียวกันแนวรองรับของสปริงโพสต์ไลน์นั้นเกิดจากเจเรลของแนวรับของไมโครเซอร์กิต ตัวต้านทาน RCON ที่มีชื่อเสียงเชื่อมต่อกับอินพุตดิฟเฟอเรนเชียลสองอินพุต ซึ่งเชื่อมต่อกับดีดผ่านขดลวดเฟรมของการเชื่อมต่อ ความชุกของอินพุตดีดจากวีซ่าอินพุตเริ่มต้นเป็น:
IinRCON = IvihґRM, de Ivih - ดีดผ่านเฟรมของ vidhilennya

แอมพลิจูดสูงสุดของแรงดันไฟฟ้าขาเข้าจากจุดสูงสุดถึงจุดสูงสุดคือ 1.8 V (ค่าปกติคือ 1.5 V) รูปแบบการเชื่อมโยงที่มองเห็นได้ทำให้คุณสามารถเปลี่ยนเฟรมจาก cat ไปด้านหน้าของ cascade ไปที่ด้านหน้าของ cascade (viv. 7 และ 4) ในการควบคุมดีดที่ส่งผ่านเฟรม ตัวต้านทาน RM จะเปิดขึ้นหลังจากนั้น ความเครียด scho ที่จะถูกสร้างขึ้นบนตัวต้านทานทั้งหมดผ่าน viv วงจรไมโคร 9 ตัวขึ้นไปตามสัญญาณของเสียงที่ดังขึ้น ซึ่งพันกันค่าของดีดขาออก เมื่อค่าของ RM เปลี่ยนไป ค่าสูงสุดของเอาต์พุตสตรีมสามารถตั้งค่าได้ตั้งแต่ 0.5 ถึง 2 A
สำหรับการยึดน้ำตก vykhid การเคลื่อนไหวที่มีพลังได้รับชัยชนะเป็นเวลาหนึ่งชั่วโมง การมองเห็นในทวนภายนอกของคอนเดนเซอร์ razdil ช่วยให้มีความพยายามในชัยชนะได้อย่างมีประสิทธิภาพมากขึ้น เพื่อรายงานตลอดเวลาตลอดระยะเวลาก่อนการหมุนรอบจะรายงานไปยังแมวที่คัดเลือก

ไมโครเซอร์กิตมีฟังก์ชันพื้นฐานหลายประการ ในการรักษาความปลอดภัยหุ่นยนต์ที่ปลอดภัยสำหรับน้ำตกภายนอก:
อ่างความร้อน;
Zahist กับความสับสนสั้น ๆ mіzh viv 4 ฉัน 7;
zahist เป็น dzherel zhivennya ที่โง่เขลา
สำหรับการดับไฟของ kinescope สัญญาณจะเกิดขึ้นในวงจรดับไฟ:
จากชั่วโมงสู่เส้นทางหมุนเวียนของบุคลากร rozgortki;
ด้วยการมิกซ์อัพสั้น ๆ viv. 4 і 7 หรือ dzherel อาศัยอยู่บนร่างกาย
เมื่อมีดหมอเปิดอยู่จะมีเสียงกริ่ง
เมื่อเปิดใช้งานการสูญเสียความร้อน
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง แปด.
3.3 TDA8357
ไมโครเซอร์กิต TDA8357 ออกแบบมาเพื่อบันทึกในโทรทัศน์ด้วยมุมมอง 90 และ 110 องศา แคสเคดเอาท์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้คนขับขับไมโครเซอร์กิตด้วยความถี่สัญญาณตั้งแต่ 25 ถึง 200 เฮิรตซ์ เช่นเดียวกับการตั้งค่าคอยส์สำหรับหน้าจอจากเอาต์พุตของด้าน 4: 3 ถึง 16: 9 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 32 และ її ไดอะแกรมโครงสร้างแสดงในรูปที่ 33. เพิ่มเทคโนโลยีไบโพลาร์ CMOS และ DMOS ลงในไมโครเซอร์กิตแล้ว

ขั้นตอนอินพุตของไมโครเซอร์กิตของค่าสำหรับหุ่นยนต์ที่มีซิงโครโปรเซสเซอร์ ซึ่งสร้างสัญญาณคล้ายไฟล์ดิฟเฟอเรนเชียลของดอกกุหลาบบุคลากรที่มีระดับอ้างอิงของความตึงเครียดคงที่ ในเวลาเดียวกัน พบว่าอินพุต strum เป็นดังนี้:
2ґIвхґRвх = IvihґRM, de Ivih - ดีดผ่านเฟรมของตัวจับ
แอมพลิจูดสูงสุดของแรงดันไฟฟ้าขาเข้าจากจุดสูงสุดถึงจุดสูงสุดคือ 1.6 โวลต์
เฟรมคอยล์ถูกเปิดในที่สุดด้วยตัวต้านทาน RM ที่เชื่อมต่อกับอินพุตแอนติเฟสของเอาต์พุตคาสเคด (viv. 7 และ 4) สำหรับการรักษาเสถียรภาพของแอมพลิจูดของ strum แกนนำ วงแหวนเสียงเชิงลบจะถูกสร้างขึ้น แรงดันไฟฟ้าของวงแหวนเรียกเข้าเป็นที่รู้จักจากตัวต้านทาน RM และผ่านตัวต้านทาน RS ไปที่อินพุตของแรงดันย้อนกลับ / ดีดซึ่งเป็นสัญญาณเอาต์พุตที่ป้อนเข้ากับอินพุตของไดรเวอร์เอาต์พุตของวงจรบริดจ์ ตัวต้านทาน RM และ RS ได้รับการจัดอันดับให้แข็งแกร่งกว่าสเตจเอาท์พุตของไมโครเซอร์กิต การเปลี่ยนค่าเล็กน้อยของตัวต้านทานทำให้สามารถตั้งค่าดีดภายนอกจาก 0.5 เป็น 2 A

ขนานกับคอยส์ ตัวต้านทานหน่วง RP ซึ่งเชื่อมต่อกระบวนการในทองแดงบุคลากร เชื่อมต่อกับคอยส์ Struma ซึ่งไหลผ่านตัวต้านทานทั้งหมดเป็นเวลาหนึ่งชั่วโมงของจังหวะตรงและกระแสน้ำวน อาจเปลี่ยนค่าได้ ดีดซึ่งไหลผ่านตัวต้านทาน RM จะถูกเก็บไว้ในดีดผ่านตัวต้านทาน RP และดีดซึ่งไหลผ่านขดลวดของเฟรม เพื่อชดเชยการเปลี่ยนแปลงในดีด มันจะถูกส่งผ่านตัวต้านทาน vimiruval ผ่านตัวต้านทานแดมเปอร์บนซัง และในกระบวนการสุดท้ายของการโยก ตัวต้านทานชดเชยสุดท้าย Rcomp จะได้รับชัยชนะ ตัวต้านทานการชดเชยที่มีชื่อเสียงรวมอยู่ใน viv 7 і 1 ด้วยการดีดเซเรลชดเชยขนาดใหญ่єการสนับสนุนสปริงบน viv 1. สำหรับzapobіgannyaฉีดสายพันธุ์vykhіdnoїบนแลนเซลอินพุตหลังจากนั้นด้วยตัวต้านทานของการเปิดไดโอด
สำหรับการดำรงชีวิตของ microcircuit สำหรับชั่วโมงของหลักสูตรหมุนเวียนต้องใช้ชีวิต dodatkovo dzherelo ของ VFB (viv. 6) การเชื่อมต่อเครือข่ายเป็นเวลาหนึ่งชั่วโมงของความเร็วหมุนเวียนได้รับการสนับสนุนโดยการถ่ายโอนภายใน การมองเห็นของคอนเดนเซอร์ razdelny ช่วยให้สามารถป้อนหม้อไอน้ำได้โดยไม่ต้องใช้ตรงกลาง การกระทบยอดของหลักสูตรหมุนเวียนเพื่อปิดหากดีด vyhidny ถึงค่าที่ตั้งไว้
โครงร่างสำหรับการดักจับ microcircuit ใช้สำหรับปิดกั้นเอาต์พุตของวงจร microcircuit ในใจของการควบคุมการดักจับความร้อนและการเปลี่ยนสวิตช์ของเอาต์พุตคาสเคดอีกครั้ง วงจรสำหรับจับไมโครเซอร์กิตจากสัญญาณภาพว่างเปล่า (viv. 8) ซึ่งสามารถใช้ร่วมกับสัญญาณ SC (sandcastle) สำหรับการซิงโครไนซ์โปรเซสเซอร์วิดีโอ Active visoky rіvenสำหรับ viv 8 เกิดขึ้นจากการยืดระยะเวลาเสียงกริ่ง ในกรณีที่เปิดทวนของวงแหวนที่ส่งเสียงกริ่งและเมื่อฮีตซิงก์ทำงาน (T = 170 ° C)
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง 9.
3.4 TDA8358
ไมโครเซอร์กิต TDA8358 ได้รับการออกแบบสำหรับการบันทึกในชุดทีวีที่มีมุมมอง 90 และ 110 องศาเป็นเอาต์พุตของเฟรมและสำหรับรับสัญญาณในการแก้ไขรูปแบบเรขาคณิต แคสเคดเอาท์พุตบริดจ์ของไมโครเซอร์กิตช่วยให้คนขับขับไมโครเซอร์กิตด้วยความถี่สัญญาณตั้งแต่ 25 ถึง 200 เฮิรตซ์ เช่นเดียวกับการตั้งค่าคอยล์สำหรับกล้องจากด้านที่เชื่อมต่อของ 4: 3 ถึง 1316: 9 โครงร่างของไมโครเซอร์กิตแสดงในรูปที่ 34 และ її ไดอะแกรมโครงสร้างแสดงในรูปที่ 35. ไมโครเซอร์กิตถูกจัดเตรียมโดยใช้เทคโนโลยีเดียวกันกับ Bipolar, CMOS และ DMOS

ไมโครเซอร์กิตคือการแก้แค้น vuzol rozgortki ซึ่งคล้ายกับ TDA8357J ทัศนวิสัยในการแสดงของวงจรชดเชยในรูปแบบของความตึงเครียดสำหรับตัวต้านทานชดเชย Rcomp สามารถเข้าไปในโกดังไมโครเซอร์กิตเพื่อรับสัญญาณในการแก้ไขรูปแบบเรขาคณิตได้ สัญญาณ Podsiluvach สำหรับการแก้ไขสัญญาณสำหรับการปรับปรุงโครงสร้างของการแก้ไขและไม่มีการควบคุมด้านหน้าโดยโมดูเลเตอร์ของวงจรของน้ำตกเอาท์พุทของสาขาแถว สำหรับการทำงานปกติของ pedisiluvach มารดามีความผิดเกี่ยวกับแหวนกระแสน้ำวนเชิงลบ ทวนของวงแหวนที่ส่งเสียงกริ่งเชื่อมต่อระหว่างข้อความที่กำลังดำเนินอยู่และต่อเนื่องของคนขับ แรงดันไฟฟ้าสูงสุดที่เอาต์พุตของไดรเวอร์ไม่มีความผิดในการเปลี่ยน 68 V และดีดเอาต์พุตสูงสุดรับผิดชอบไม่เกิน 750 mA
พารามิเตอร์หลักของไมโครเซอร์กิตแสดงไว้ในตาราง 10.
4.ไมโครเซอร์กิตโตชิบา4.1 TA8403K, TA8427K

ไมโครเซอร์กิต TA8403K และ TA8427K ติดอยู่ที่คุณภาพของเอาต์พุตคาสเคดของเฟรมในชุดทีวีที่มีเอาต์พุตสูงสุดในเฟรมของเฟรมไม่เกิน 1.8 และ 2.2 A (สำหรับ TA8427K) ไมโครเซอร์กิตออกให้ในเคส HSIP7 การพัฒนาไมโครเซอร์กิตแสดงในรูปที่ 36. วงจรไมโครประกอบด้วยแหล่งจ่ายไฟไปข้างหน้าและข้างหน้าและวงจรเพิ่มแรงดันไฟฟ้าเพื่อสร้างแรงกระตุ้นในการเคลื่อนที่แบบหมุน บล็อกไดอะแกรมของไมโครเซอร์กิตแสดงในรูปที่ 37.

สัญญาณของโรเตอร์ของบุคลากรไปที่อินพุตของไดรเวอร์ด้านหน้า (viv. 4) และเมื่อสัญญาณถูกส่งไปยังน้ำตกเอาท์พุท viv 2 จะเกิดขึ้น สำหรับการเก็บเกี่ยวของเอาต์พุตคาสเคด วงจรเพิ่มแรงดันจะใช้จากตัวเก็บประจุภายนอกและไดโอด เป็นเวลาหนึ่งชั่วโมงการเก็บเกี่ยวน้ำตก vykhid จะดำเนินการผ่านการเรียกไปยัง viv 6 ไมโครเซอร์กิต หลังจากผ่านไปหนึ่งชั่วโมงของจังหวะการหมุนเวียน หลังจากวงจรเพิ่มเติม การก่อตัวของแรงกระตุ้นในจังหวะการหมุนเวียนจนกระทั่งถึงความดันชุบแข็ง แรงดันไฟฟ้าที่สะสมบนตัวเก็บประจุภายนอกของการเพิ่มแรงดันจะถูกสะสม Qia napruga มาที่ viv 3 ไมโครเซอร์กิต เมื่อน้ำตกอยู่บนทางเดิน vi จะเกิดแรงกระตุ้นของสนามหมุนซึ่งจะเปลี่ยนไปตามแอมพลิจูดของแรงดันไฟฟ้าของไมโครเซอร์กิต ลักษณะสำคัญของไมโครเซอร์กิตอยู่ในตาราง 11 (ค่าสำหรับไมโครเซอร์กิต TA8427K แสดงในธนู)
4.2 TA8432K
วงจรไมโคร TA8432K เป็นน้ำตกที่เชื่อมโยงบุคลากรกับการก่อตัวของสัญญาณบุคลากร microcircuit ถูกปล่อยออกมาในเคส HSIP12 และแสดงในทีวีที่มีความเกียจคร้านสูงสุดในทีมงานของ cinescopes ไม่เกิน 2.2 A ก่อนที่จะมีโกดังไมโครเซอร์กิต ประกอบด้วย: ทริกเกอร์อินพุต สัญญาณคล้ายนักบิน สัญญาณเอาต์พุต และวงจรสำหรับการก่อตัวของพัลส์ในการเคลื่อนที่แบบหมุน

แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ 39.

พัลส์การซิงค์เฟรมมาที่อินพุตทริกเกอร์ (viv. 2) ซึ่งเป็นเอาต์พุตของการเชื่อมต่อกับสัญญาณทางลาด รูปร่างของสัญญาณฟันเลื่อยออกไปด้านหลังตัวเก็บประจุเสริมที่เชื่อมต่อกับ viv 5. การเปลี่ยนแปลงแอมพลิจูดของสัญญาณของบุคลากรที่ดื่มนั้นดำเนินการสำหรับแลนเซอร์เพิ่มเติมซึ่งเชื่อมต่อกับ viv 3 ไมโครเซอร์กิต เมื่อมีการสร้างสัญญาณ cadre พวกเขาดื่มเพื่อมาที่คนขับด้านหน้า เมื่อน้ำตกแข็งแกร่งและเป็นเส้นตรงมากขึ้น มันจะอยู่ที่สัญญาณของเสียงเรียกเข้า ดังนั้นมันจะมาที่ viv 6 ไมโครเซอร์กิต รูปแบบน้ำตกVyhіdnyโดยไม่ต้องดีดกลางvіdhilennya (viv. 11) สำหรับการเก็บเกี่ยวของเอาต์พุตคาสเคด วงจรเพิ่มแรงดันจะใช้จากตัวเก็บประจุภายนอกและไดโอด เป็นเวลาหนึ่งชั่วโมงการเก็บเกี่ยวน้ำตก vykhid จะดำเนินการผ่านการเรียกไปยัง viv 7 ไมโครเซอร์กิต หลังจากผ่านไปหนึ่งชั่วโมงของจังหวะการหมุนเวียน หลังจากวงจรเพิ่มเติม การก่อตัวของแรงกระตุ้นในจังหวะการหมุนเวียนจนกระทั่งถึงความดันชุบแข็ง แรงดันไฟฟ้าที่สะสมบนตัวเก็บประจุภายนอกของการเพิ่มแรงดันจะถูกสะสม ด้วยเหตุนี้ ก่อนที่ไมโครครอสเคมจะไหลออก จะถูกนำไปใช้โดยรถไฟใต้ดินโดยประมาณ เมื่อน้ำตกกำลังจะหมดไป แรงกระตุ้นของสนามหมุนจะก่อตัวขึ้น ซึ่งเปลี่ยนโดยแอมพลิจูดของแรงดันไฟฟ้าของไมโครเซอร์กิต ลักษณะสำคัญของไมโครเซอร์กิตอยู่ในตาราง 12.
4.3 TA8445K

ไมโครเซอร์กิต TA8445K นั้นคล้ายกับไมโครเซอร์กิต TA8432K สำหรับลักษณะเฉพาะและพื้นที่จัดเก็บ โดยเฉพาะผู้ที่เคยแนะนำสถาบันอุดมศึกษาที่มีช่วงความถี่ 50/60 Hz ในไมโครเซอร์กิต สัญญาณแทนที่ถูกส่งไปยัง viv 4 ไมโครวงจร แผนภาพบล็อกของไมโครเซอร์กิตแสดงในรูปที่ 40.













 ในหัวข้อ")



















